Showcasing Trustworthy Autonomous Mobility: AutoTRUST at EUCAD 2025
From 13–15 May 2025, the AutoTRUST project made a strong impression at the 5th European Conference on Connected and Automated Driving (EUCAD 2025), hosted at the Joint Research Centre (JRC) in Ispra, Italy. Our team actively engaged with stakeholders across Europe and beyond, demonstrating the project's core vision: Building Trustworthy, Adaptive, and Inclusive Autonomous Mobility Systems.
Live Demonstrations: Turning Research into Impact
One of the highlights of the event was our on-site demonstration, jointly delivered by AutoTRUST partners from
CERTH, AviSense.AI, and the KIOS Research and Innovation Center of Excellence (University of Cyprus).
The demo attracted representatives from CINEA, including Pedro Alfonso Pérez Losa, Matthias Langemeyer,
and our project officer George Sarros.
Guests experienced firsthand the advanced perception, interaction, and communication technologies in development—
from intelligent sensing and real-time AR systems to secure and explainable AI frameworks. Special thanks to
Alke Electric Vehicles for providing the demonstration vehicle that showcased these integrated technologies.
Booth Engagements: Strengthening Synergies Across the Ecosystem
The AutoTRUST booth served as a hub for meaningful exchanges with experts from Horizon Europe and other
international projects. These conversations highlighted shared challenges and promising avenues for collaboration,
further reinforcing AutoTRUST’s central role in building an inclusive, cooperative innovation ecosystem.
We also thank the I-Sec Lab from the University of Geneva for their valuable support in our dissemination efforts.
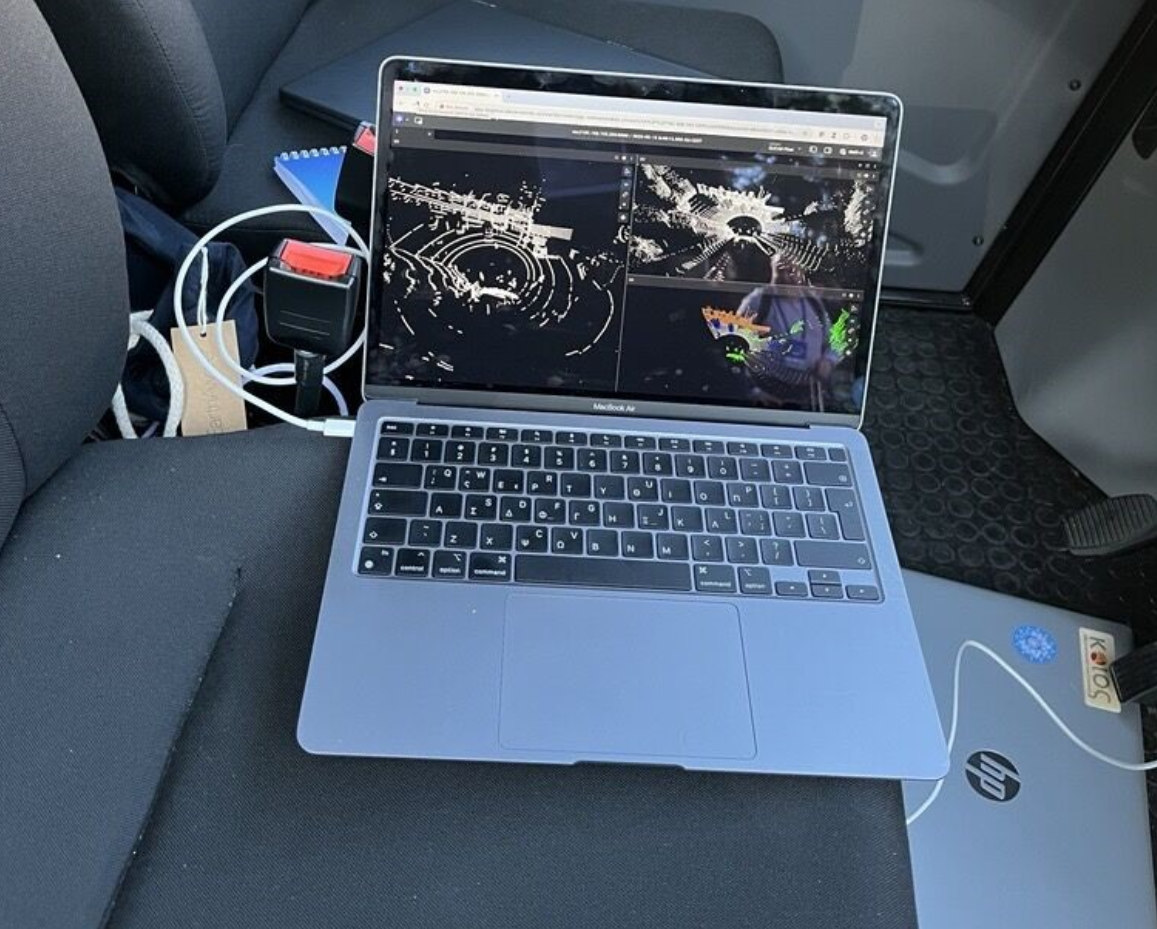
Technical Highlights: Advancing Perception Capabilities
As part of EUCAD 2025, AviSense.AI presented a novel 3D LiDAR segmentation method, developed within the AutoTRUST framework. Designed for real-time, robust perception in complex urban environments, this innovation supports our mission to enhance the safety, reliability, and public acceptance of autonomous mobility systems.